創造技術科「制御技術実習」
※ 写真をクリックすると拡大表示します
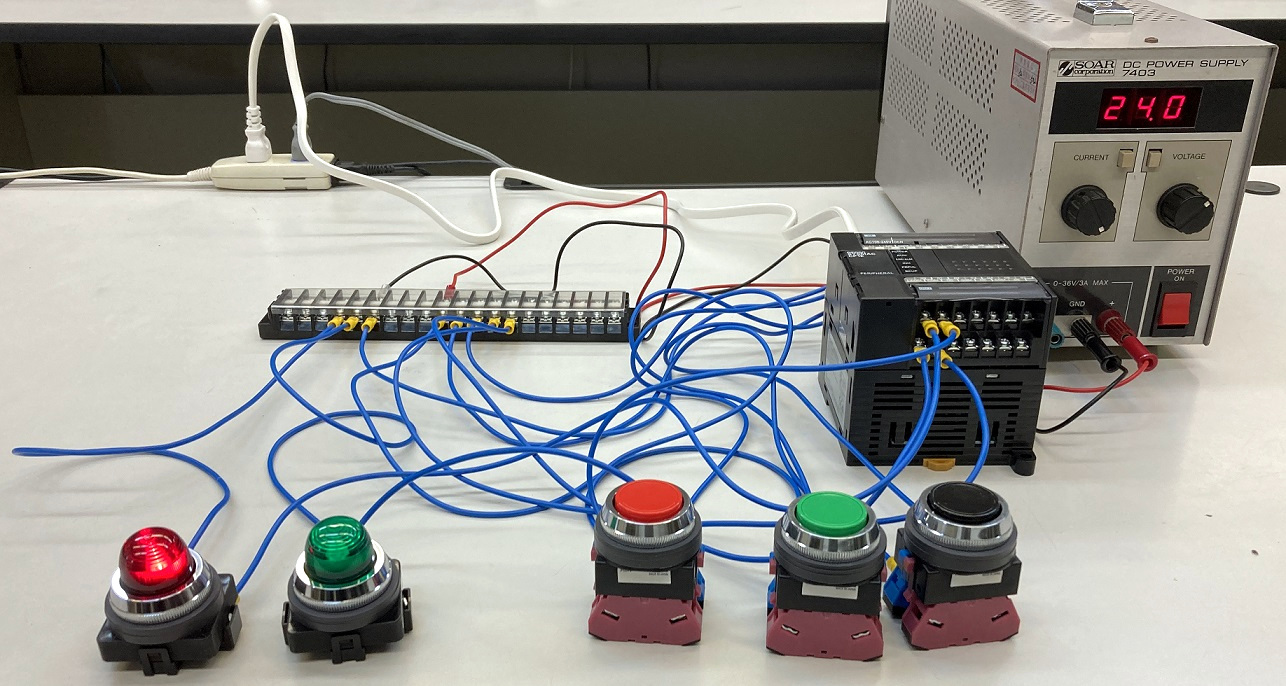   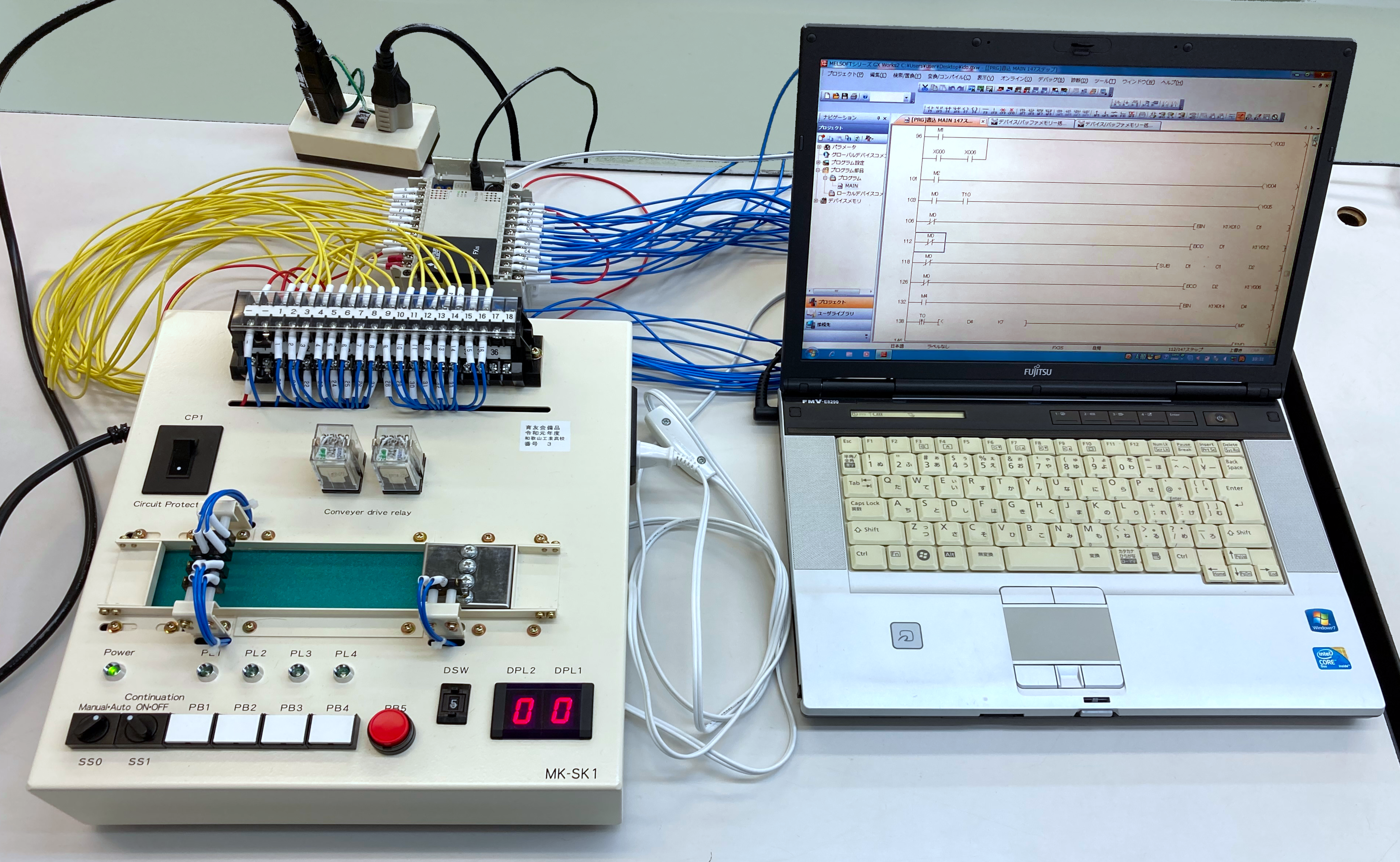 |
シーケンス制御 設定した順序に従って制御をおこなう方法をシーケンス制御といいます。シーケンス制御の基礎であるスイッチによる論理回路、電磁石によって動作させるスイッチ(リレー)を使用した基本回路、これらを発展させたPLC(プログラマブル・ロジック・コントローラ)について、実際に回路を組みながら学習します。 PLCは工場やアミューズメント施設のアトラクション、信号機など身近なものの制御に数多く使われる装置で、創造技術科では技能検定3級や2級の一部に対応する内容を扱います。 1年前期: 「スイッチとリレーシーケンス」 AND回路、OR回路、NOT回路 自己保持回路 「PLCを用いた基本制御」 インタロック回路(早押し回路) タイマ回路、点滅回路 カウンタ回路 1年後期: 「システム構築実習Ⅰ」 -技能検定3級準拠 2年前期: 「システム構築実習Ⅱ」 -技能検定2級に一部準拠 |
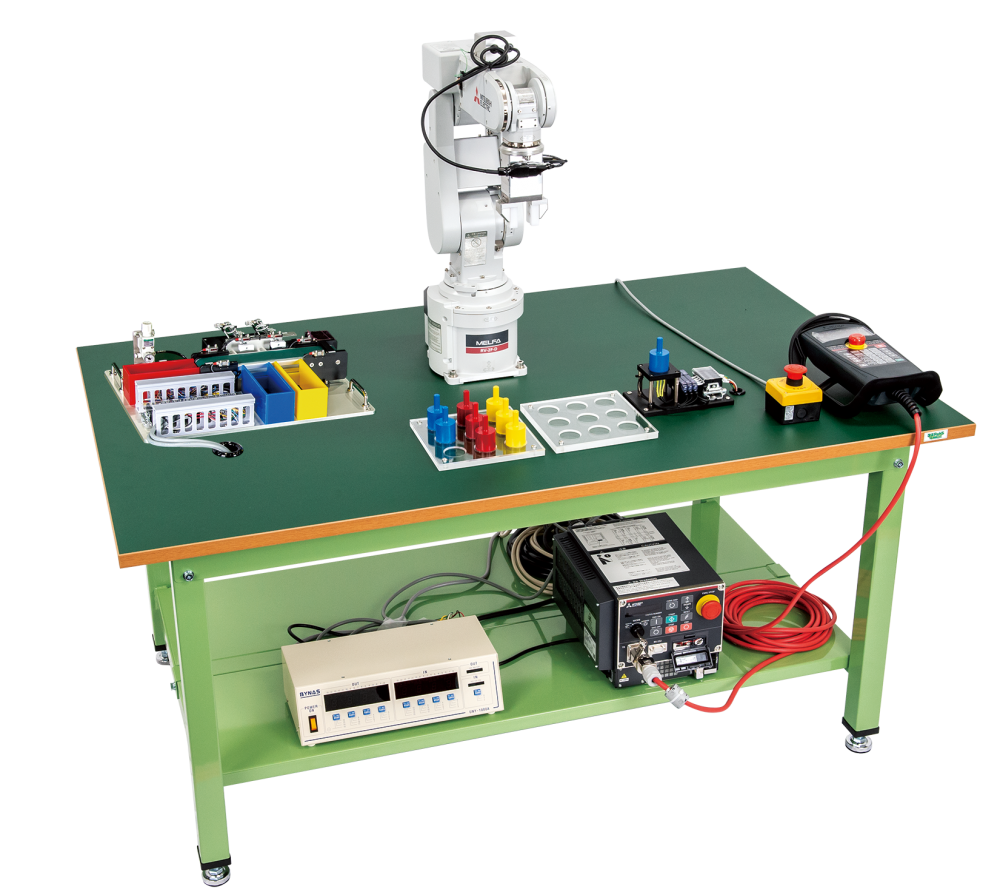 ロボット学習システム(株式会社バイナス)  |
産業用ロボットの教示 産業用ロボットは、多くの工場や作業現場に導入され、これを取り扱うことのできる技術者が求められています。 創造技術科では、垂直多関節ロボットを用いて、産業用ロボットを動かすためのプログラミングである「教示」について学習します。 教示は、ロボットの姿勢を決める各軸(モータ)の位置座標をティーチングボックスでロボットを手動操作しながら取得し、座標間をつなぐ動きを専用ソフトウェア(RT ToolBox3)で設定することで行います。使用するロボットが三菱製であるため、動作プログラムを記述する言語はMELFA-BASICⅤを用います。 この実習は、労働安全衛生法(労働安全衛生規則)に規定される「特別教育」"産業用ロボットの教示や、教示に係る操作の業務"の内容に一部準拠しています。 -令和7年度より創造技術実習Ⅲ(3年)に導入-  ティーチングボックス |
    ステッピングモータ サーボモータ ブラシレスDCモータ  |
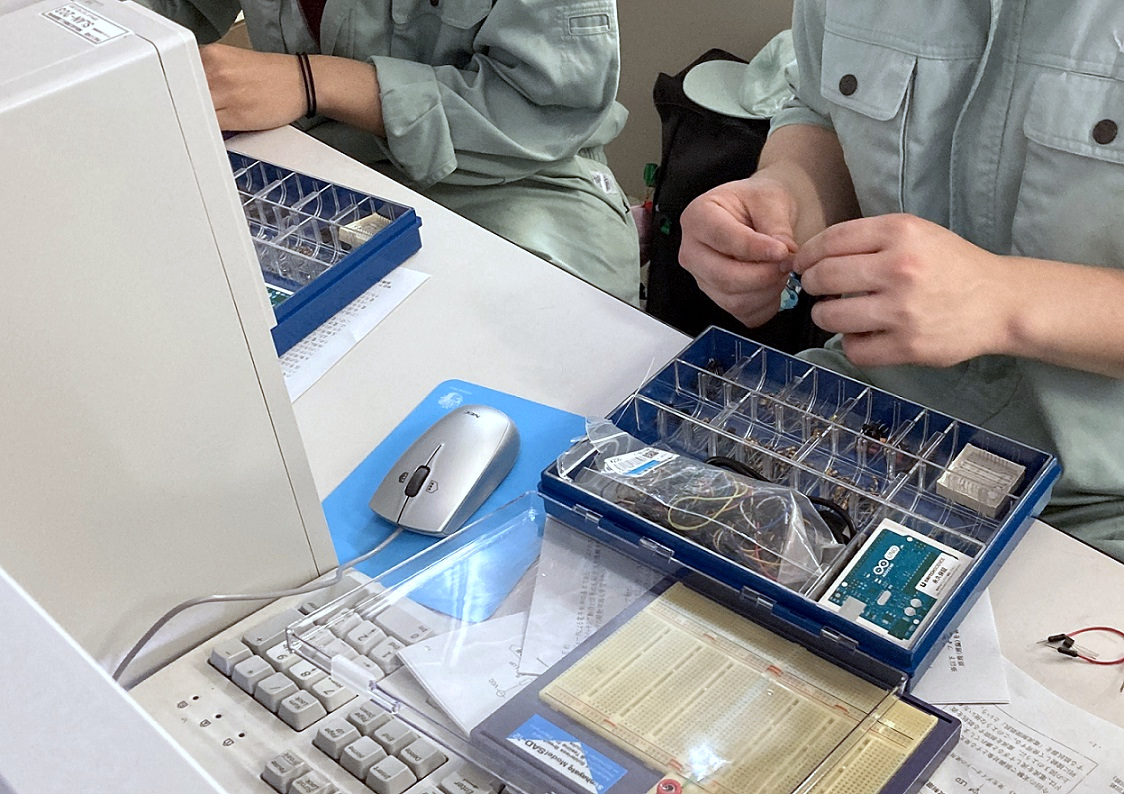
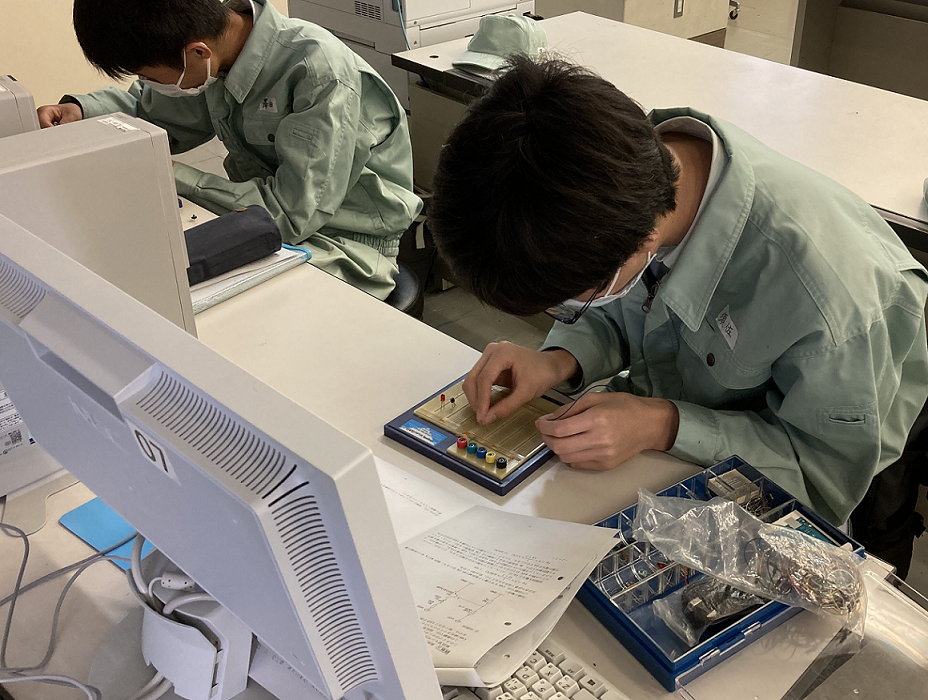
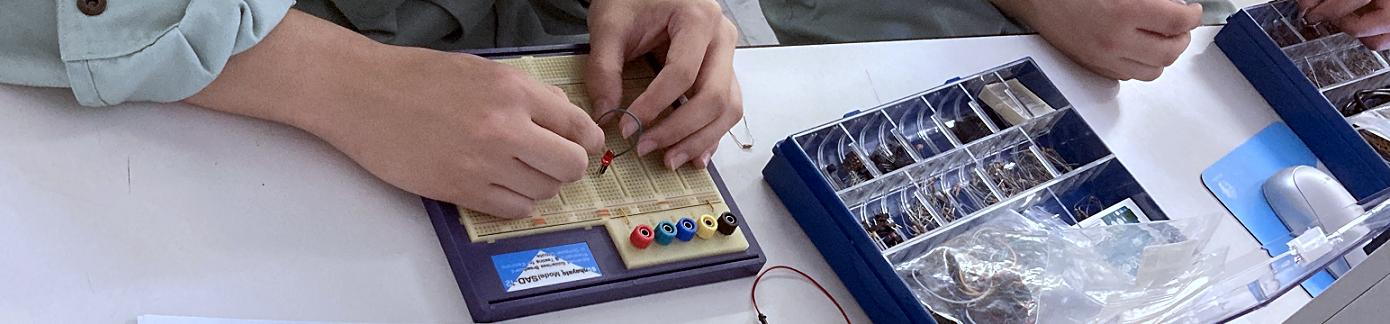
電子制御 1年後期:「トランジスタのスイッチング動作」 トランジスタのスイッチング動作を題材に、電子制御の基本的な考え方を、ブレッドボード上に実際に回路を組み立て、動作を確認しながら体験的に学習します。内容として、電子回路設計の考え方や駆動回路の基礎、センサ回路の基礎、電気信号の反転などについても取り上げます。 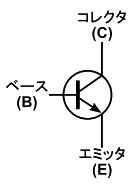  2年後期:「アクチュエータ制御」 ステッピングモータ、サーボモータ、ブラシレスDCモータなどの、電源にただつないだだけでは回転しない「駆動回路や制御回路を必要とするモータ」について、各モータの動作原理と制御方法を学習します。この実習では制御回路にマイクロコンピュータ(ArduinoUNO)を利用するため、プログラミングに関する知識も同時に学習します。 |
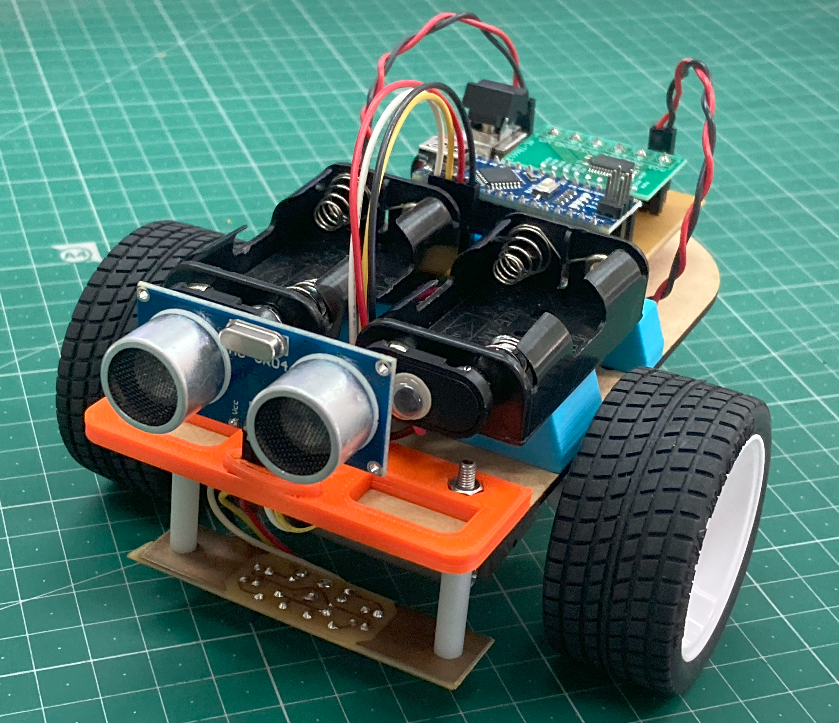 |
フィードバック制御 目標値と現在値を比較して、現在値を計測しながら目標値になるように制御を繰り返す制御方法を「フィードバック制御」といいます。 この内容は、ロボットカーを進化させてゆく最終過程で取り扱います。 |